

Publication date: April 13, 2026
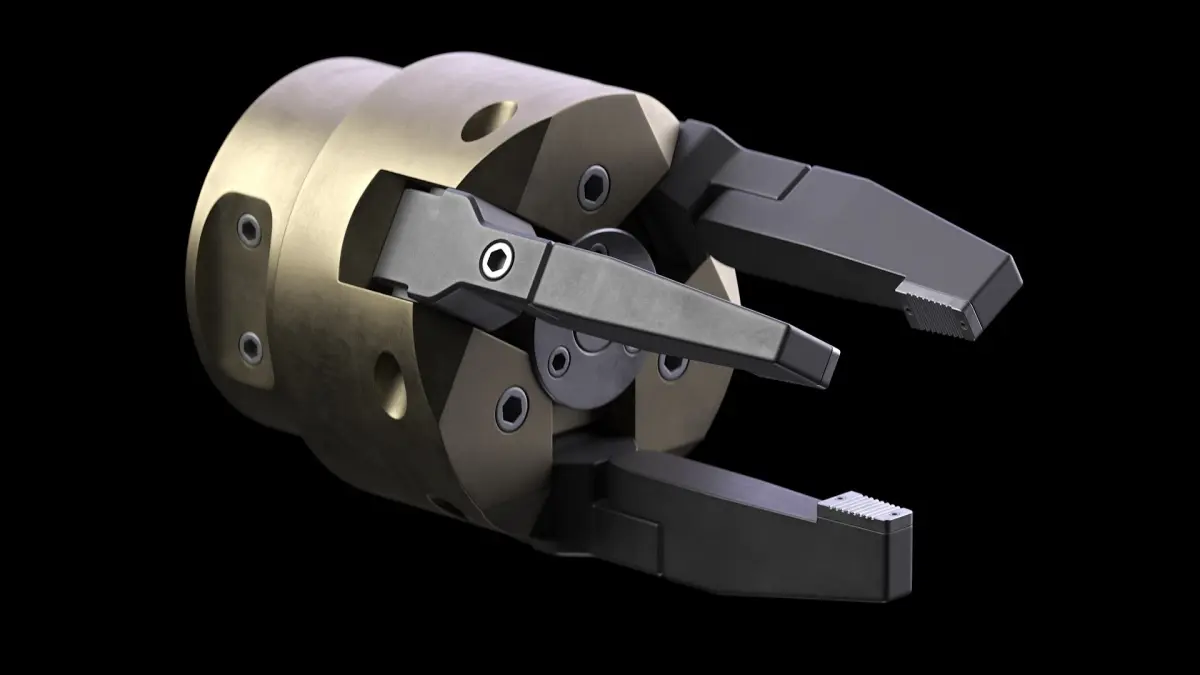
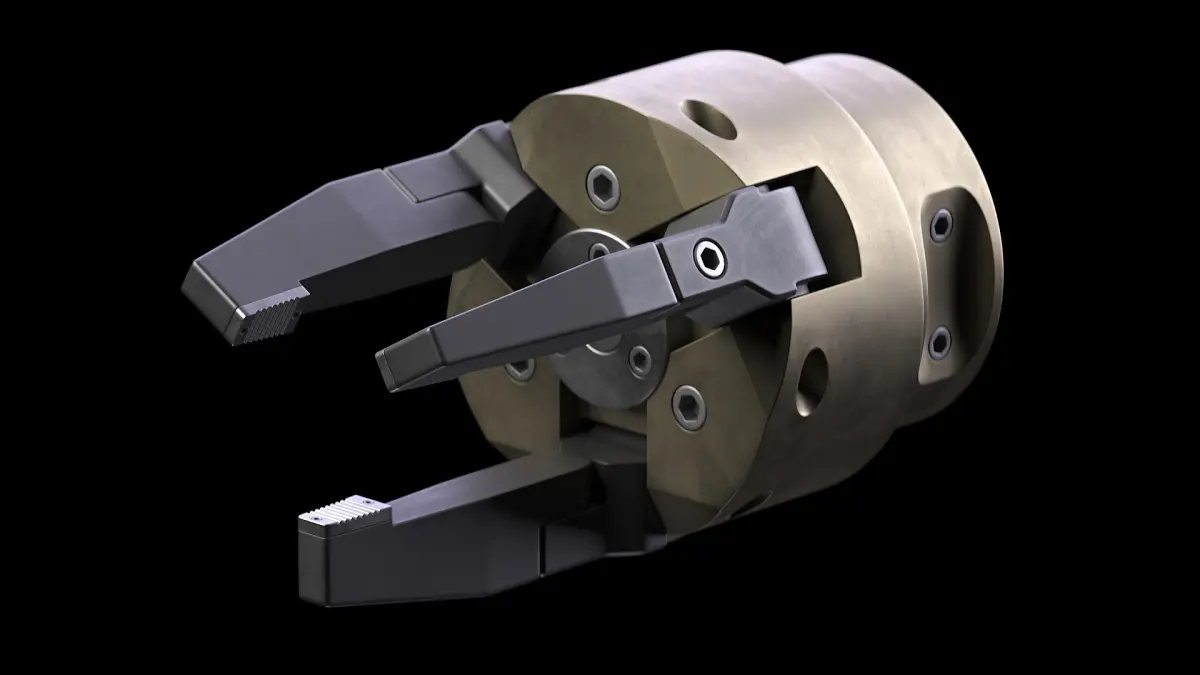
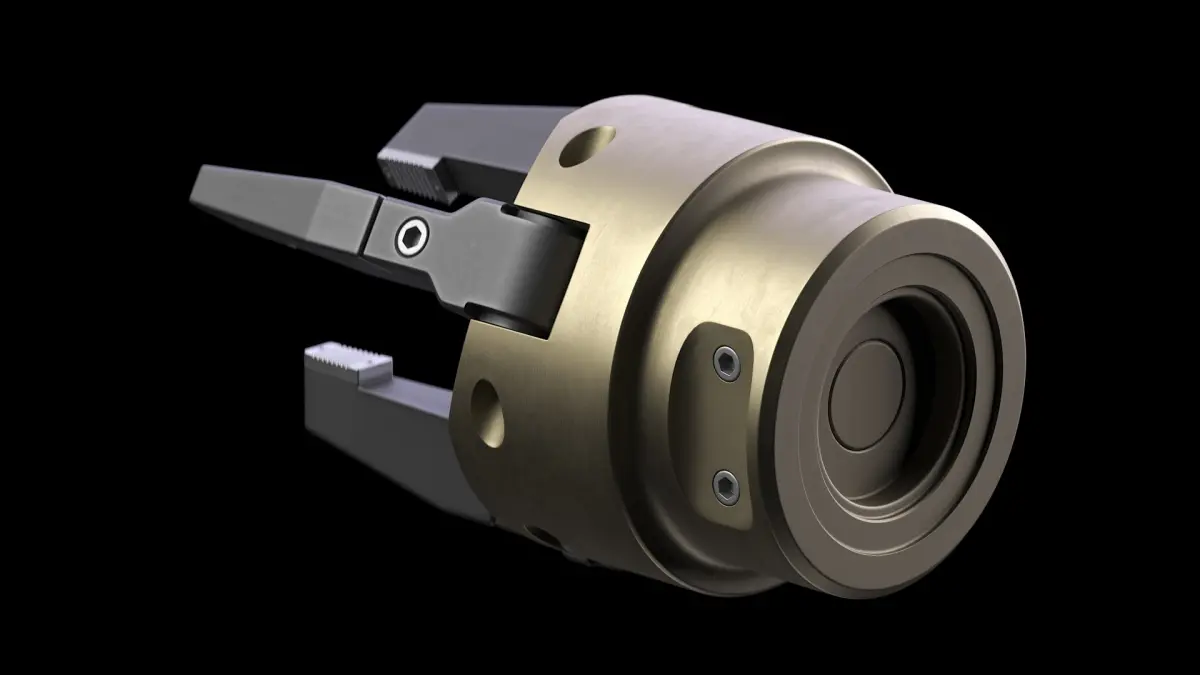
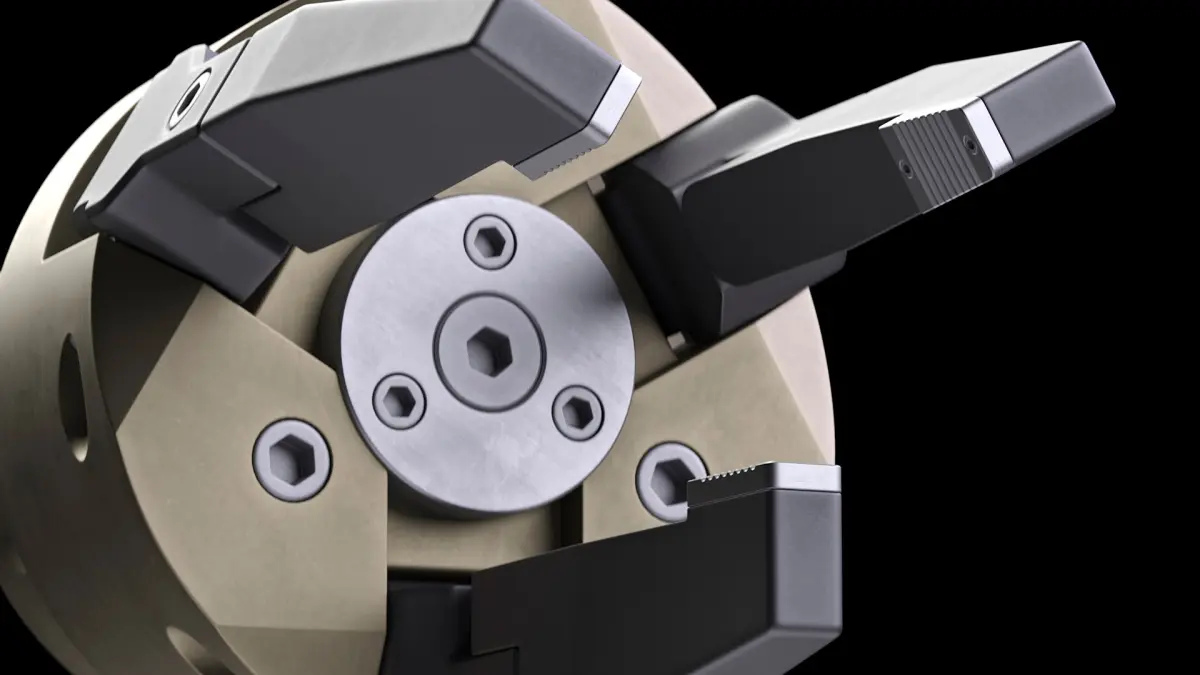
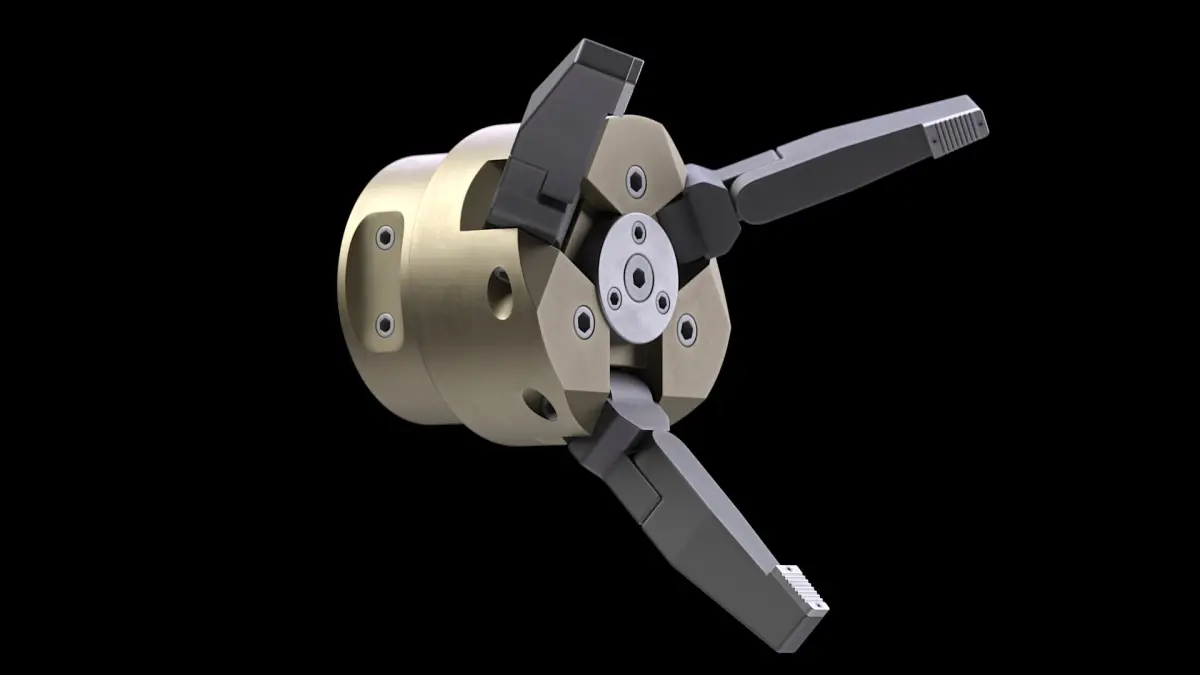
Buy 3-finger robotic gripper 3D model
$29
License: Editorial Uses Only
3D Model details
- turbosquid Platform
- Animated
- Rigged
- Ready for 3D Printing
- VR / AR / Low-poly
- PBR
- Textures
- Materials
- UV Mapping
- Polygons: 35312
- Vertices: 36152
- Geometry: Unknown
Similar models

Find the models you need