
Publication date: 2023-02-13
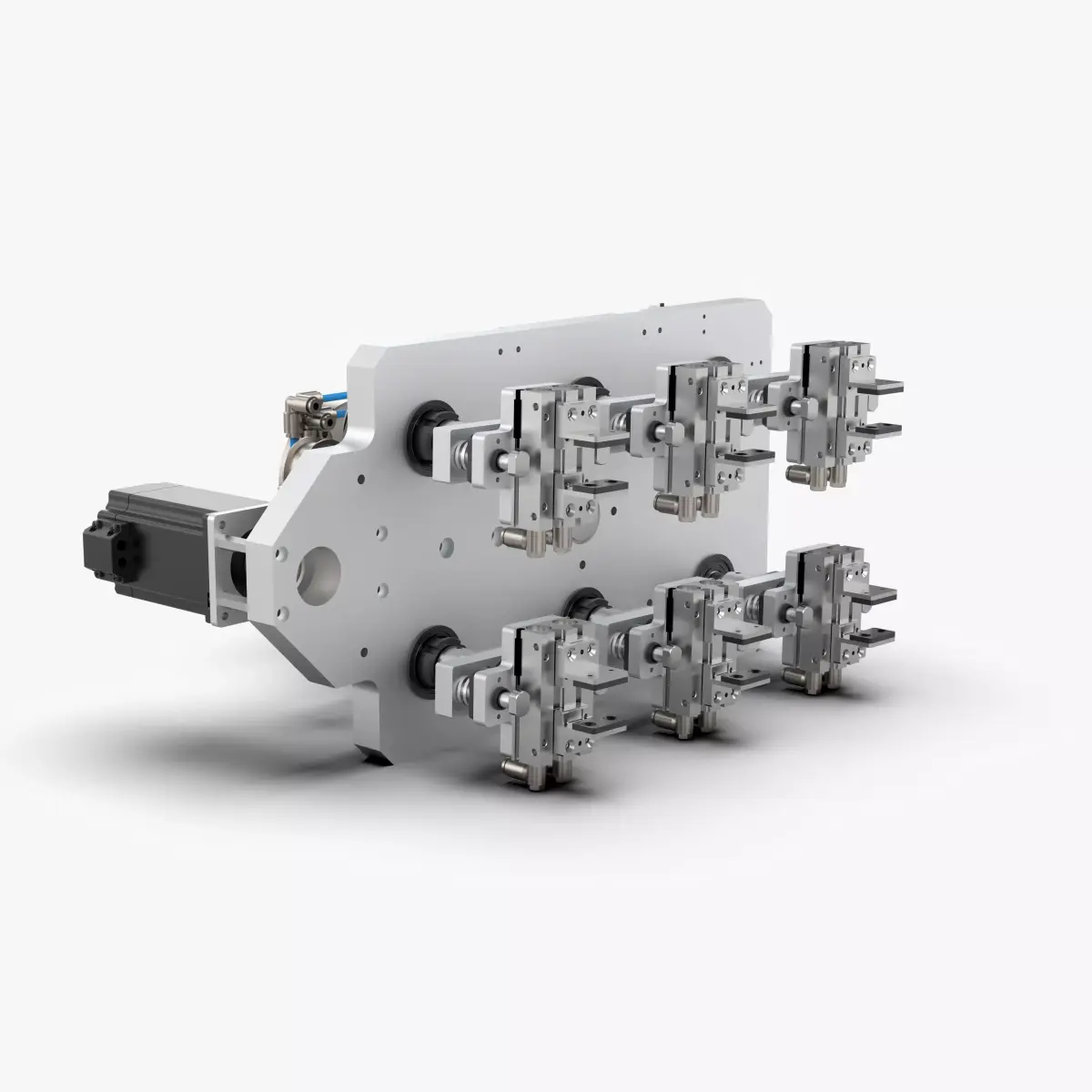
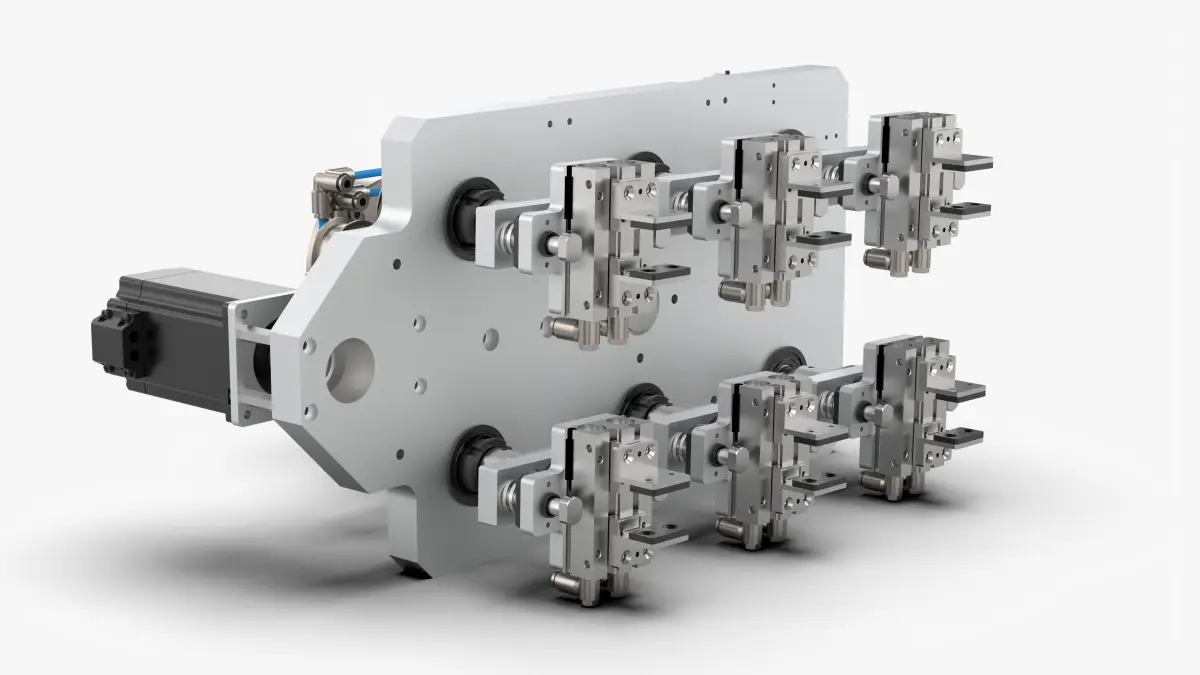
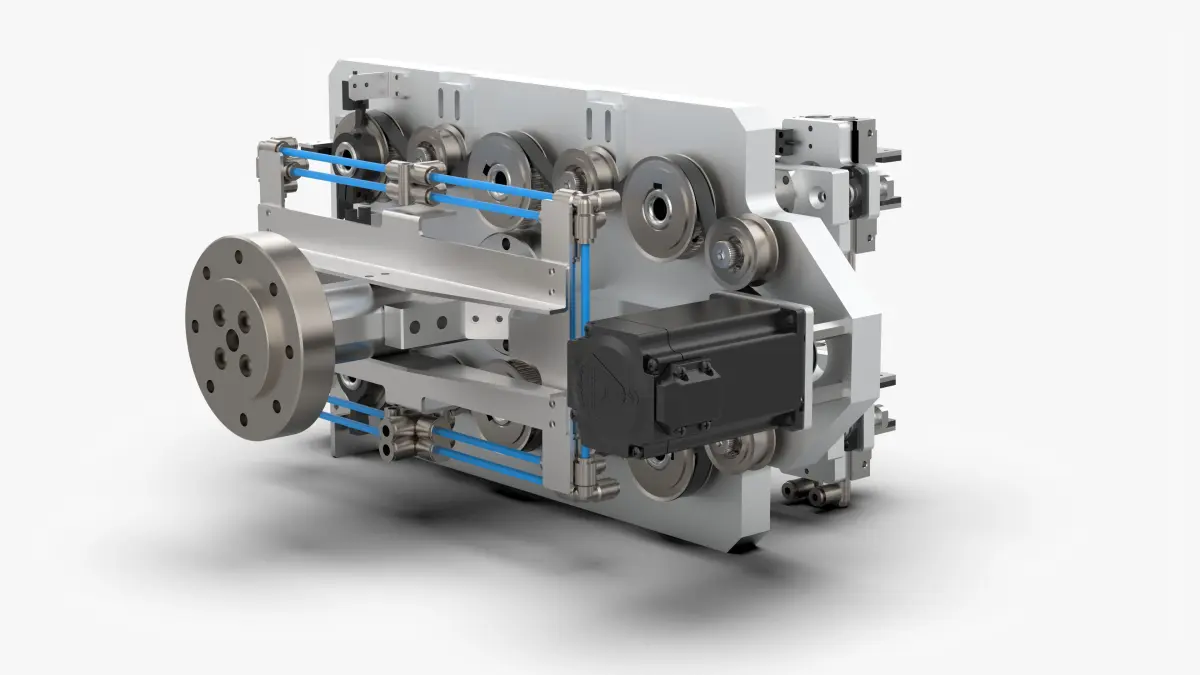
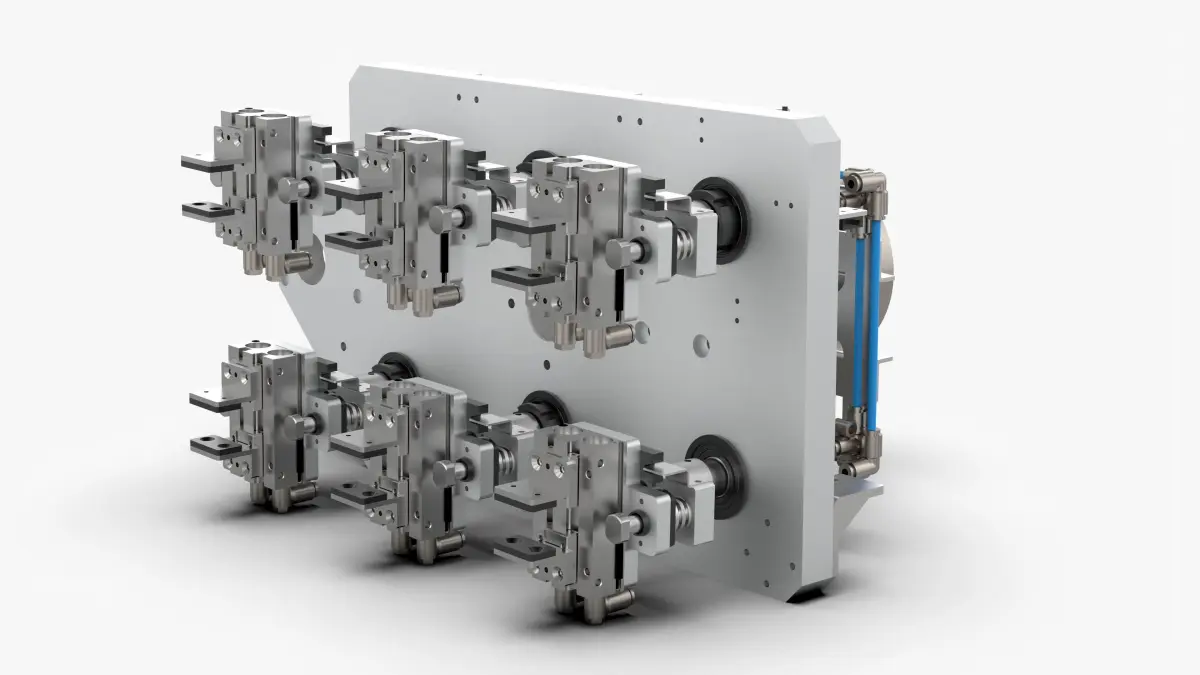
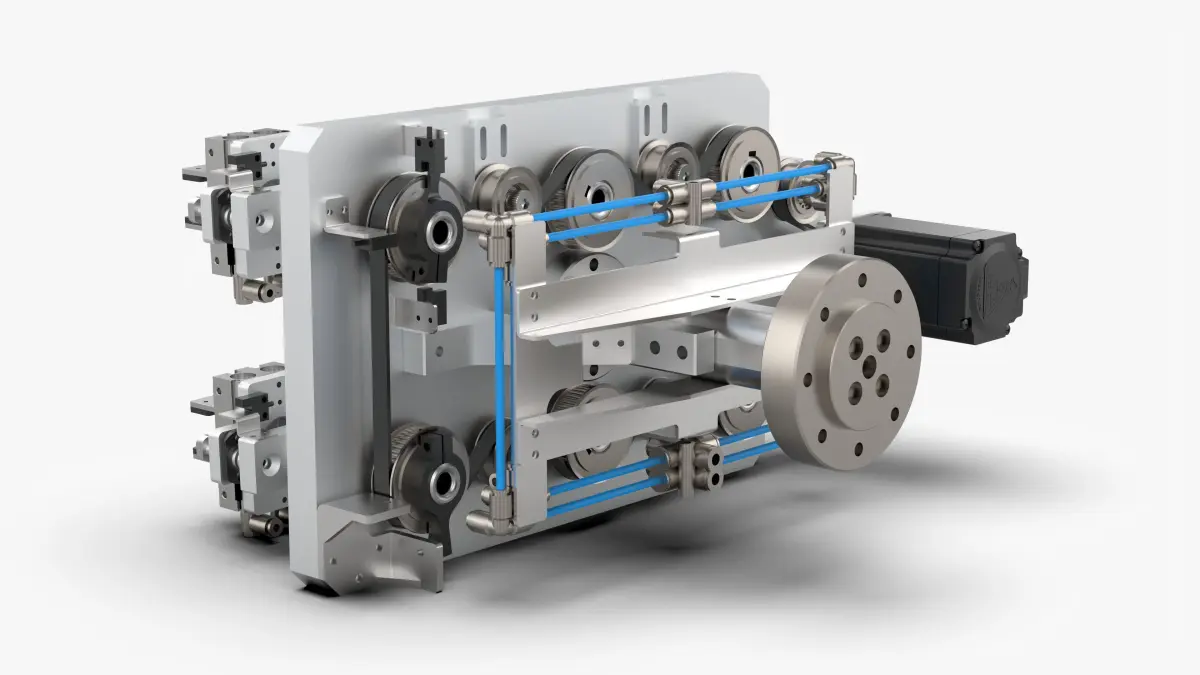
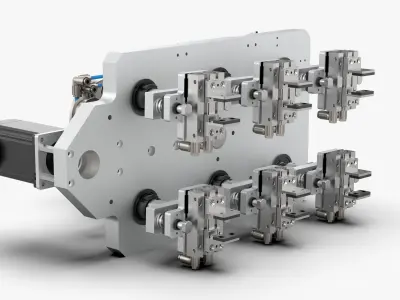
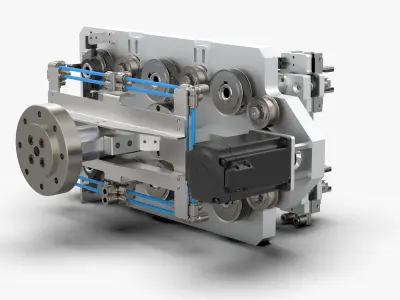
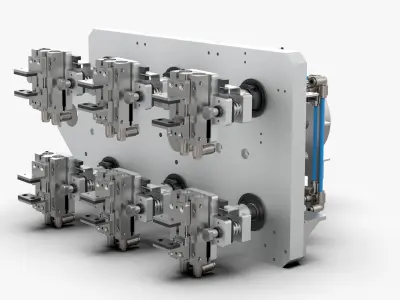
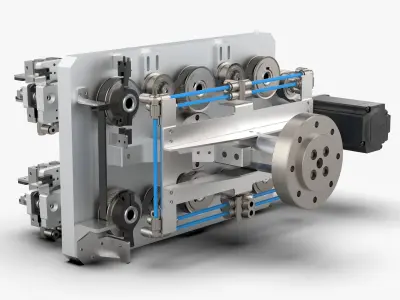
Buy Robot End Axis Pneumatic Gripper 3D model
$14
License: Royalty Free

author:
Lovano
3D Model details
- cgtrader Platform
- Animated
- Rigged
- Ready for 3D Printing
- VR / AR / Low-poly
- PBR
- Textures
- Materials
- UV Mapping
- Polygons: 639304
- Vertices: 1917912
- Plugins used
- Geometry: Polygon mesh
Similar models



Find the models you need