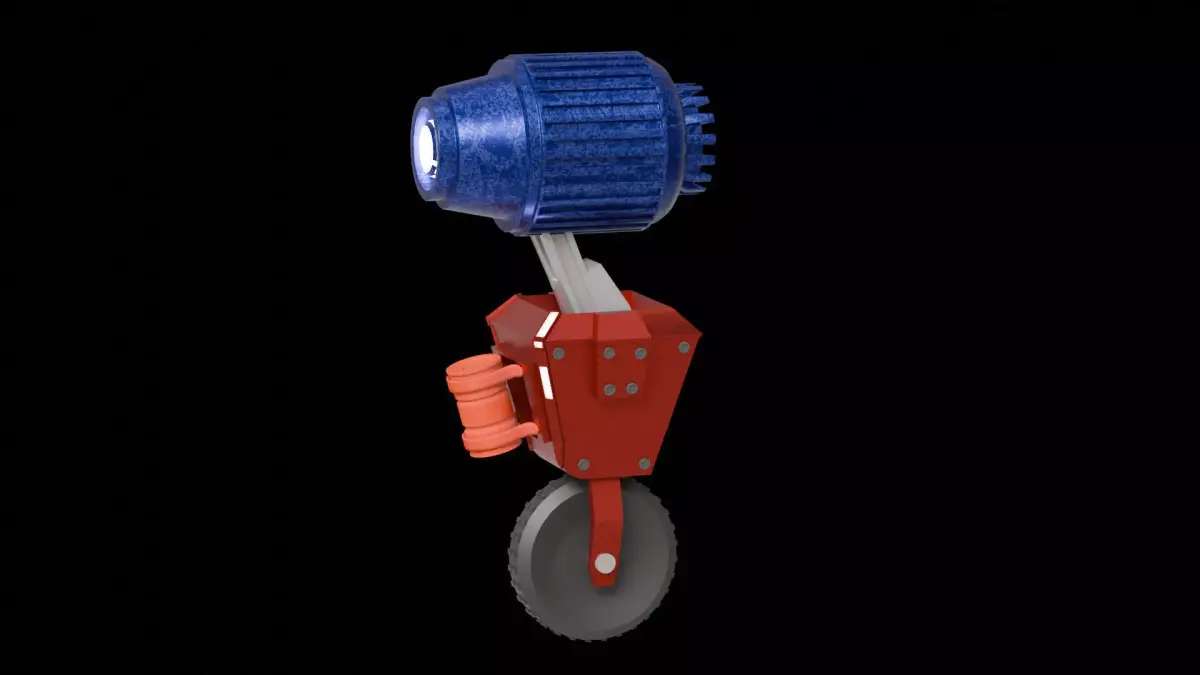
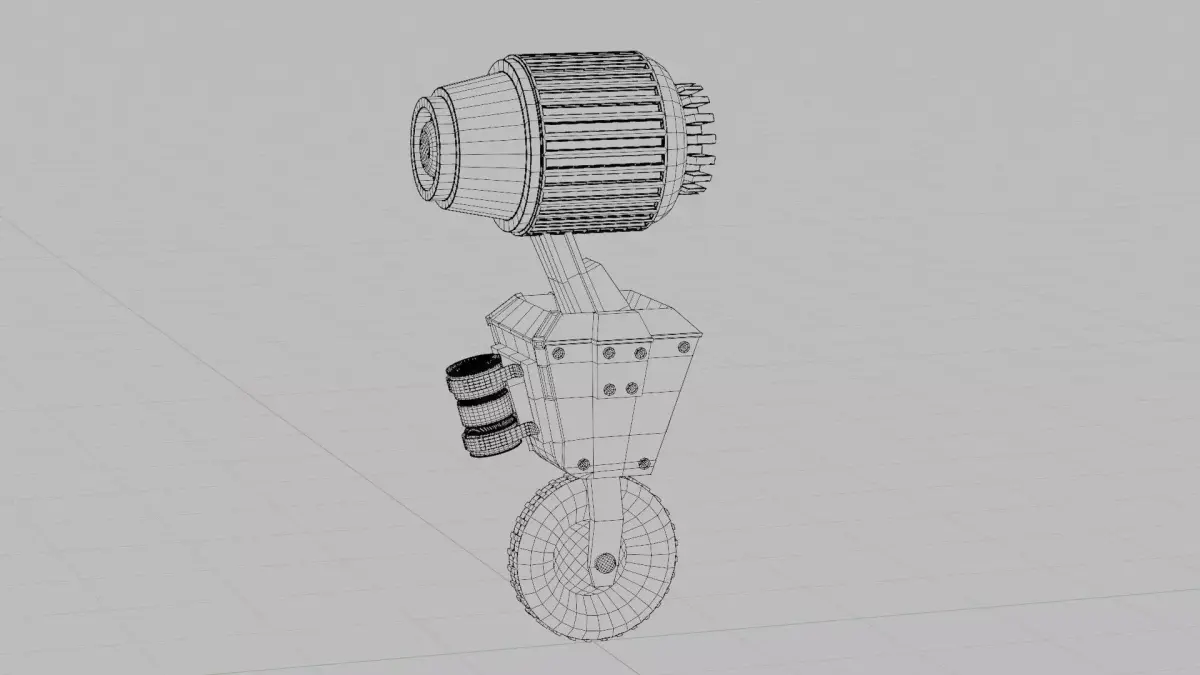
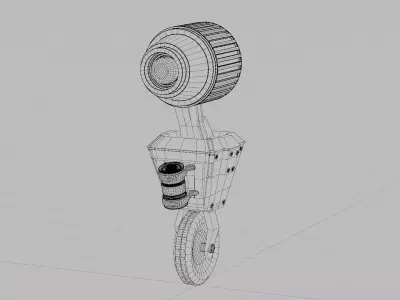
This is a detailed 3D model of a self-balancing uni-wheel robot (also known as a unicycle robot or Wheelbot). The design focuses on dynamic stability and agile maneuverability, ideal for integration into a variety of digital projects, including:Animation and Game Design: Use it as a character or autonomous agent in a sci-fi or tech-inspired environment.Engineering Simulations: The model can be used for physics simulations, digital twins, and testing navigation algorithms in environments like ROS or Gazebo.Product Visualization/Prototyping: Ideal for visualizing concepts before physical prototyping and dynamic control.Key Features:Dynamic Balancing Mechanism: Single-Wheel Drive: Propulsion and primary directional control are achieved through a single, central drive wheel.Detailed Mechanical Components: The model includes intricate external components, such as a sturdy frame, motor mounts, potential battery placement.High-Quality Topology: The model boasts clean geometry and efficient UV mapping, suitable for high-quality renders and real-time applications.
BLEND (Blender, filesize: 3.16 MB), FBX (Autodesk FBX, filesize: 1020 KB), PNG (PNG, filesize: 7.88 MB)